While it is tempting to jump right into prototype design, the first step in any project should be translating the project goals into technical requirements. The two main categories of requirements for this project are picking and fretting, but there will be some other requirements that don’t fall neatly into those two categories.

The approach I took to determining requirements is a combination of musical analysis (chords, songs), academic research, and comparisons to existing robot guitars.
Picking Requirements
There is a lot more to picking or plucking a guitar string than many robot guitars would lead one to believe. Some of the most important aspects of how to energize a guitar string are:
- How hard you pick the string, impacting the final amplitude (volume) of the note
- Controlled by the path and orientation of the pick or finger
- Where you pick the string, impacting the timbre (harmonics) of the note
- Additionally impacted by pickup selection on electric guitars
- What material contacts the string (finger, pick material, pick thickness), impacting the timbre of the note
- How quickly you can pluck consecutive notes, impacting the type and tempo of the music
- What other ways does a guitar player use their picking hand to make music (slap and pop)
Plucking Strength
The strength of the note (how loud it sounds) is basically proportional to the amplitude of the vibrating string. One common way to control the amplitude of the string is to change the angle of attack (‘pitch’ angle) of the pick, which effectively changes the displacement of the string at the point where it falls of the tip of the pick. The chart below shows how StrumBot was able to get 20dB of dynamic range by varying just this one parameter.
Could the same effect be achieved with a fixed pick angle but a varied pick height? It could certainly be achieved by fixing the pick angle and varying the pick direction (just a coordinate system rotation around the string) although this would make strumming much harder.

Many beginner guitar guides indicate that pick grip stiffness and pick roll angle are the key to controlling tones related to picking and strumming. Grip stiffness seems to be somewhat related to effective pick ‘pitch’ angle, but pick yaw angle is often associated with new tones and timbres instead of just volume. Z Machines, for example, has no ‘pitch’ angle at all, but a very steep ‘yaw’ angle and extremely stiff grip. This allows for very fast notes at a sharp tone and consistent volume. I have yet to see a guitar robot that varies pick ‘yaw’ angle dynamically.

Pick Position
Strumming or picking in the middle of the guitar produces a very different set of tones compared to when playing near the bridge or the neck of the guitar. This can be exacerbated by the use of the pickup-selector switch on electric guitars to focus the amplification on one area of the strings.

This technique is extremely easy for humans to take advantage of, because moving the picking hand up and down the strings is a simple degree of complexity to add. However, this choice is usually somewhat personal and not indicated in tablature. Perhaps there is some kind of heuristic that can determine where along the base of the guitar a note should be struck, but without it the degree of freedom would be wasted on a robot.
Pick Material
Picks and fingers are the two obvious categories of pick materials. Within the category of picks, different types or thicknesses of plastic can have subtle effects on the music. From what I can tell, it is rare to use different types of picks within the same song, although mixing one type of pick with occasional finger use is common enough to be considered.

Sometimes pick types (and often pick vs finger preference) can be known on a per-song basis, so making this an easy to configure aspect of robot setup (but not necessarily automated) could be a good compromise.
Pick Speed
Pick speed is the most quantitative requirement associated with picking and plucking. By examining a few different popular (and fast!) songs from different genres I could find a reasonable upper bound for required pick speed.
The fastest picking in music is probably when the same note on the same string is played repeatedly, either indicated in the tablature note-by-note or with a tremolo effect. One popular example of this is the guitar solo from Michael Jacson’s ‘Beat It’. At 155 beats/min and 4:4 time, these 1/32 notes are occurring at a rate of 1240 notes/min (just above 20Hz). This is on par with the speed record for Z Machines, so it is not out of the realm of possibility for a robot guitar.

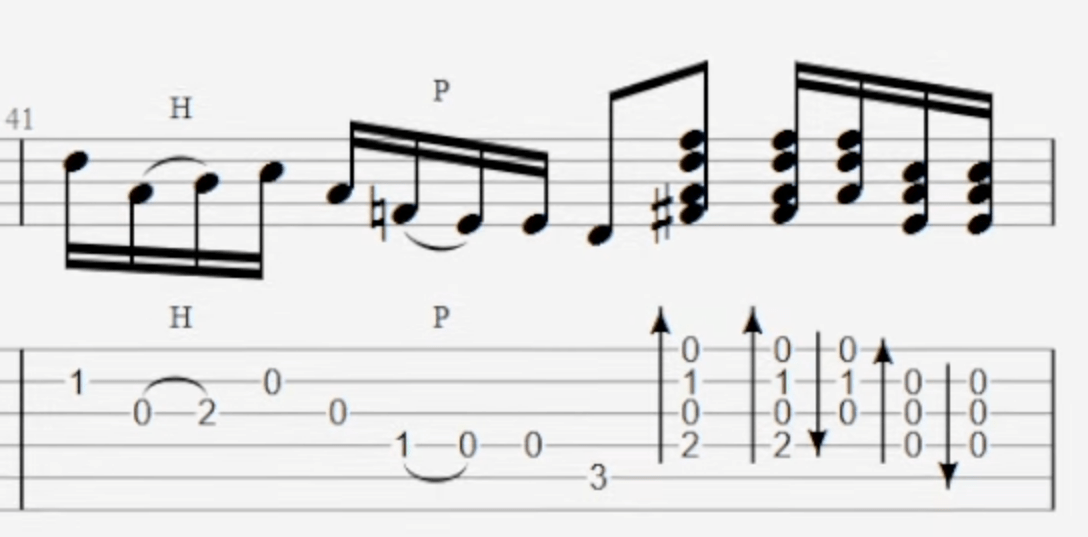
When an artist needs to switch between strings, they cannot pick quite as quickly, but the speed achievable by top performers is still very impressive. In ‘Eruption’ by Van Halen the song switches between multiple strings (although sometimes with hammer on/off effects) on 1/32 notes in 4:4 time at 92 beats/min. This is a rate of 732 notes/min (just above 12Hz) for notes within a few strings of each other.

To find the fastest strumming I turned towards bluegrass music. Billy Strings plays plenty of fast-paced songs, and his ‘Beaumont Rag’ is just one example. At 130 beats/min and 4:4 time the 1/16 chords in this song occur at a rate of 520 notes/min (almost 9Hz). Some songs may be a bit faster, but picking and plucking on all of the strings at about this pace is not uncommon!
As a final comparison point, Richard Vindris included details on the speed of his StrumBot which lets us see the source of time delays and latencies in a comparable robot.
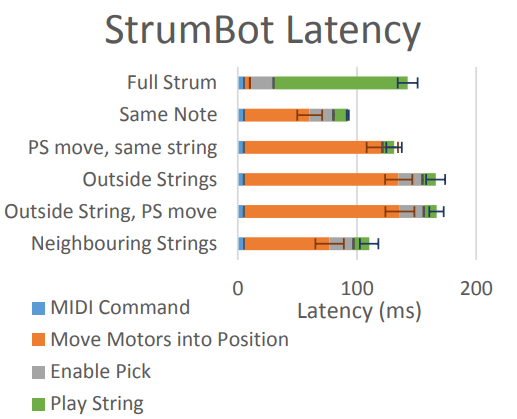
Playing the same note on the same string is the fastest case he tested, and it doesn’t seem unreasonable to achieve the 20Hz of MJ’s ‘Beat It’ with some optimizations. Moving to new strings (and setting up their new fretting) takes significantly more time and puts into question how easy it will be to achieve 12Hz for Van Halen’s ‘Eruption’. However, StrumBot is not able to play consecutive notes on the same string without sliding a fret actuator, so a masked fret actuator would significantly help here. Richard also mentions in the paper that it takes exactly 100ms to execute a full strum motion, which matches the 9Hz strumming required for many of Billy Strings’ songs.
Other Methods
Slapping and popping strings (with the thumb and forefinger) can produce a very different kind of sound than strumming or picking. It is more percussive and can help the beat of the song stand out. it is also used more frequently on bass guitar than other styles, but it certainly comes up in all kinds of music. Unlike other pluck effects, slap tap and pop are often found in the tablature for the song, which makes them prime candidates for automation.
Picking Requirement Summary
Although there are a lot of picking techniques that can be used to create different tones and feelings my concern is that they are not frequently indicated in guitar tablature, so implementing them into a robot would be a wasted degree of freedom. However, allowing for statically reconfigurable options for different styles of music could be beneficial.
Statically Reconfigurable Features:
- Pick material, thickness, and style (including simulated finger)
- Pick ‘yaw’ angle relative to string
- Pick position along the string
- Pick ‘grip stiffness’ (to avoid a ‘pitch’ angle degree of freedom)
Range of Motion Requirements:
- 2D positional range of motion (strength optimized for strum direction)
- Fixed, orthogonal pick ‘pitch’ angle (watch item: maybe replace pick stiffness with a ‘pitch’ angle degree of freedom)
- High string clearance for slaps and pops
Speed Requirements:
- Alternating up/down notes on the same string: 20Hz
- Adjacent notes within two strings: 12Hz
- Alternating up/down strumming: 10Hz
Path requirements:
- Strumming (up and down, selectively omitting strings on the ends)
- Picking/Plucking single strings
- Slapping and popping single strings
Fretting Requirements
The fretting hand does a lot more than just brace strings against frets to create a specific note. The fretting hand is responsible for bending notes by pulling the strings across the fretboard, sliding notes by moving the point of contact up or down the fretboard, activating notes with hammer-ons and pull-offs, and even muting notes.
To evaluate different fret and finger combinations I used this repository of about 4000 ways to play 800 chords as a reference. Obviously, some of those are uncommon, unusual, or unnecessary but it gives a broad range of combinations that are a good representation of the capability of the human hand. The python script and excel file used to interpret the chord data can be found in this commit of the project repository.
Hammer-On / Pull-Off / Tapping
Hammer-ons and pull-offs are a way of energizing a string while transitioning between adjacent notes on the same string across two different frets. The finger fretting the higher note executes a pluck or tap during the transition that excites the string. This requires some amount of ‘grip’ between the fretting finger and the string in order to pull it out of alignment (on pull offs) and provide the energy, while hammer-ons require a fast and forceful fret-engaging maneuver to vibrate the string. I think that this specific feature of fretting will require the most experimentation to get right because of its dynamic nature.
Similar to a hammer-on, a tap is used to excite a string just by the action of fretting it (no right-hand action). This requirement will probably evolve in parallel with hammer-ons.
Bends
When a fretted string is pulled across the fretboard the tension is increased, and as a result the pitch is increased. bends are normally indicated as half bends or full bends (bends, steps, and semi-tones seem to be used synonymously here). This requires gripping the string enough to force it sideways without slipping off the ‘finger’ holding it down.

‘Vibrato’ is an effect caused by repeatedly bending/unbending a string to create an oscillating sound. From what I can tell, the typically occurs on the order of 5-8Hz (where each cycle is a full bend and un-bend of a note) and is the driving case for bend speed.
Slides
Slides occur when a finger that is contacting the string to create a node at the fingertip (not the fret) is moved along the length of the string (quickly) to transition the note continuously to the new note. Besides requiring that a string can be contacted by an actuator consistently without fretting, slides require the finger to move along the neck of the guitar very quickly.

Van Halen’s ‘Eruption’ is again a good example of slides. While playing at around 12 Hz a note may slide up a few frets in a single cycle (< 100ms)! Alternately, a finger may slide the entire length of the guitar in a full beat (500ms in this case). Considering that StrumBot was able to move the entire length of their string (although shorter) in about 100ms this should not be too hard to achieve.
Multi-String Fingering
The most common type of barre chord involves using the index finger to hold down all of the strings on one fret, then using the other fingers to fret a few strings even higher on the neck (masking the common fret for just those strings). Sometimes the index finger leaves strings open at the low or high end (or both!). There are a few other exceptions, such as the E6 chord below which uses the pinky finger to barre four strings, although a robot could always use an alternate fingering.

Another frequent type of multi-string fingering is the need to fret two adjacent strings at the same time. Unlike traditional barre chords, however, the multi-fretting occurs higher up on the neck and so adjacent strings cannot be held down for ease, then masked by a different fretting. When three adjacent strings need to be held down, it is often done with two fingers. Usually, it is the index or middle finger holding down two strings while the other fingers each get one.
The big questions from a requirements perspective are:
- How many actuators need the ability to hold down multiple strings?
- Should the requirement to barre up to all six strings on the lowest part of the fretboard be treated as a special case? (like a moving capo?)
From analyzing the dataset of chords mentioned earlier I found that only 2% of them involve two fingers that are both fretting more than one string at the same time (and no cases where three fingers are fretting more than one string at the same time). In all of the cases where there are two multi-string fingerings, there is a potential fingering solution that involves no more than two strings per finger on the higher finger (although three strings would come in handy).
Fret Combinations
Obviously, the guitar will not be required to play any combination of any strings on any fret at the same time. That is musically unnecessary and would result in an overwhelming number of actuators! But what kind of ‘spread’ between adjacent frets is required? And which frets on the guitar are actually used?
While my dataset of chords only includes frets 0-16, many of the example songs I’ve referenced already include frets as high as 20. Having 20 frets is a fairly standard number for a guitar so it should be a decent baseline requirement.
Jamming a bunch of different actuators down all on the same fret can be tricky because they may need to overlap or twist in order to line up. When looking through my dataset I found no cases where four different fingers are required on the same fret, but a few cases where three fingers are required. The most common case is when the fingering alternates High/Low/High/Low/High between two frets.
In all of these cases the need for a third finger on a single fret can be bypassed by either omitting one of the strings (to play an alternate form of the chord) or in a worst case, just playing the chord somewhere else on the guitar in a different form. Needing to fit two fingers on the same fret, however, is extremely common and will be a requirement for this project.
In my dataset of chords the largest range of frets played at the same time, although rare, is 5 frets (gap of 3 frets). This can occur on all locations across the neck of the guitar, not just on the closely-spaced high notes. However, when playing single notes it can be common to stretch at least 9 frets in quick succession.

One final consideration is that the 3rd and 4th fingers (ring and pinky) rarely ever play the lowest strings. From my chord dataset it shows that it is extremely rare for either finger to play the lowest string (especially the pinky) and only slightly less rare for them to play the second-lowest string (again, especially the pinky). From looking at the suggested fingering for these chords, there is likely the possibility to completely remove the lowest two strings from the capability of two fingers if the mechanical limitations of the human hand are ignored, but this will need to be verified depending on the architecture of the machine.
Fret Speed
The main questions involving fret speed are:
- How much time is available to engage/disengage a string with a fretting actuator?
- How much time is available to change a finger to a new fret?
- How does this scale with the distance between frets?
For the fastest single-string playing, notes alternate at a rate of 20Hz. This means that an entire fret/release/fret cycle for the higher fret must occur at 10Hz. Sometimes notes can move up or down the neck continually at this pace (as in the ‘Beat It’ solo). One lazy solution is to treat the transitions as slides and play the first ‘new’ note in a series without fretting, which keeps the actuator on the same 10Hz timescale. A separate potential solution is to ‘hand off’ a string to a second actuator to avoid a slide, which might not be possible depending on the eventual architecture.
Fretting Requirement Summary
Because a goal of this project is to not use one actuator per string/fret combination, it is extremely likely that some kind of sliding fret actuator solution will be used. However, being able to mask and reveal pre-fretted notes (instead of only sliding between notes) on the same string is an important feature in guitar playing.
Fret Actuator Requirements:
- Minimum of 4 total fretting actuators (one per finger)
- Minimum of 2 actuators with ability to fret two adjacent strings on the same fret at once
- Minimum of 1 actuator with ability to fret any number of adjacent strings at once, but only required at the lowest position on the neck
- Can fit up to two actuators on any fret (but three would be beneficial)
- All actuators can play any string (potentially ring and pinky actuators can skip low strings)
Fret Positioning Requirements:
- Can play single strings on frets 1-20
- Can play chords and barres on frets 1-16
- Can play chords with up to 5 frets of span
- Can play single notes with up to 9 frets of span (but probably more)
Fret Re-Positioning Requirements:
- Can slide 2 frets in 75ms (12Hz)
- Can slide the length of the guitar in 500ms
- Can reposition some fingers to new frets while others are fretting
String Interaction Requirements:
- Can touch a string light enough to mute it
- Can excite a string hard enough to hammer on or pull off
- Can engage a string strong enough to seat it behind a fret
- Can drag a string across the fretboard far and strong enough to bend the note up a half step or full step, repeating at 8Hz
- Can maintain modal contact with a string while sliding between frets
Other Requirements
Muting
Muting is an underappreciated aspect of good robot guitars. It must be possible to:
- Mute individual or groups of strings while or after plucking or strumming them
- Mute individual or groups of strings while plucking or strumming other strings
- Control the rate of muting of a group of strings (for example, to create a hard or faded ending to a song)
Traditionally, muting is done to some extent with either of the performer’s hands, and using multiple parts of the hand (palm, fingers, thumbs), depending on the circumstances.
A simple requirement would be to force the fretting actuator to be capable of muting a string that is being fingered. This covers many cases, but an additional method of muting a group of adjacent strings (potentially all of the strings) is also required. This may miss some edge cases where a non-fretted string needs to be muted, but additional fingering complexity or group-muting capability should be able to achieve a similar result. If not, adding muting capability to the picking mechanism could be an alternative.
Options for group muting near the head of the guitar could be either a feature of an independent barre actuator or the forefinger actuator. At the bridge of the guitar a dedicated variable-muting actuator could be used for a lot of ‘palm mute’ effects that are found in tablature.
Summary
With the exception of muting, fretting and picking are fairly independent challenges. In both cases it would be beneficial to trial various simulated architectures against these requirements with example chords and songs to see how they perform before doing any detailed design.
It may be that some requirements end up harder to meet than others, but usually there is some kind of tradeoff that can be made to maintain adherence to the goals of the project.